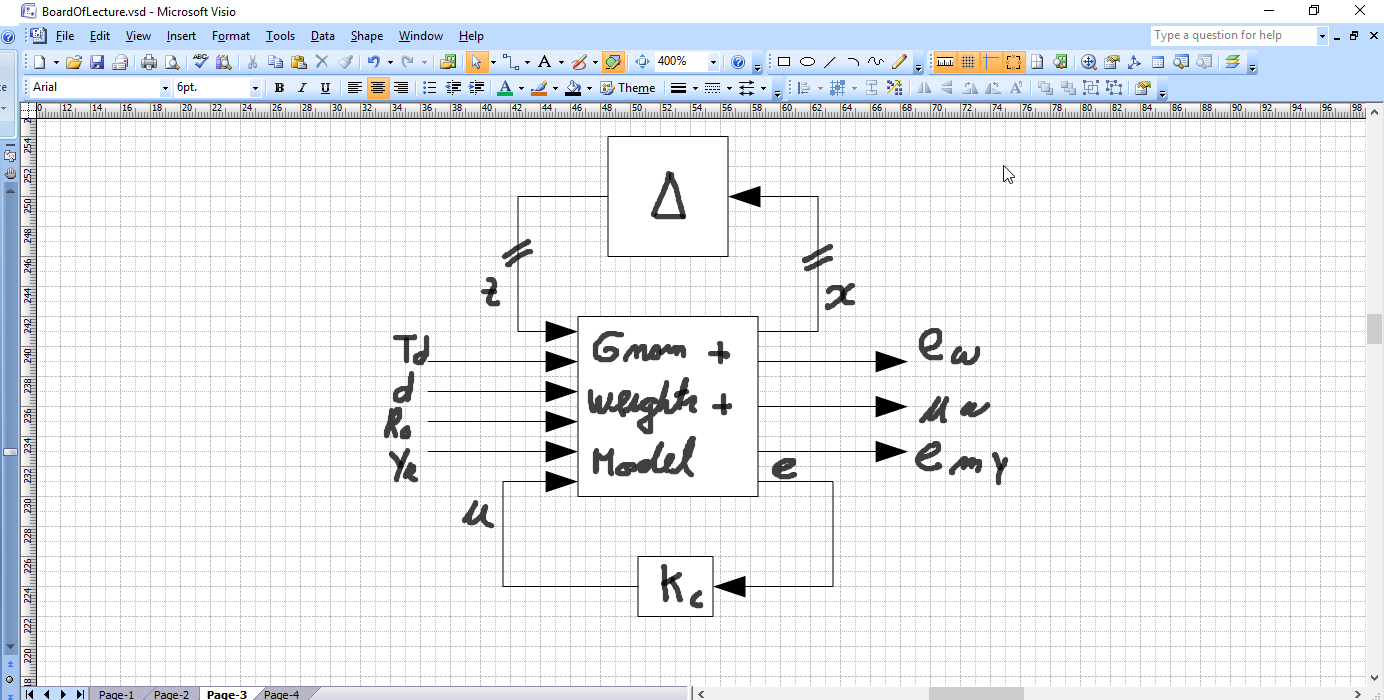
In this video, Robust Control of Hard Disk Drive Servo, Part 5, we expand the original model found in Part 4. We add the structured uncertainty block Δ that reflects the tolerance of each parameter of the physical model and we include the weights whose reciprocals indicate the desired frequency response of the signals that we want to keep within certain margins.
The idea is the to get everything ready to start our actual implementation and design in Matlab. We do not need to do any special calculation or algorithm since Matlab will take care of that, but we are saying too much, this is material for next video.