In this video, I describe the design of a PID controller for the Feedback Process Trainer PT326 (the ‘hairdryer’). Based on an identification of the process using the Matlab System Identification Toolbox, I describe the process of designing a PID controller that satisfies robust stability margins and has noise immunity. I used Simulink to implement two simulations, continuous and discrete (hybrid). I illustrated the phenomenon of windup and its solution.
This is the outline of the video:
0:19 System Description
6:22 Filtering Noise
13:02 Final Open Loop Transfer Function
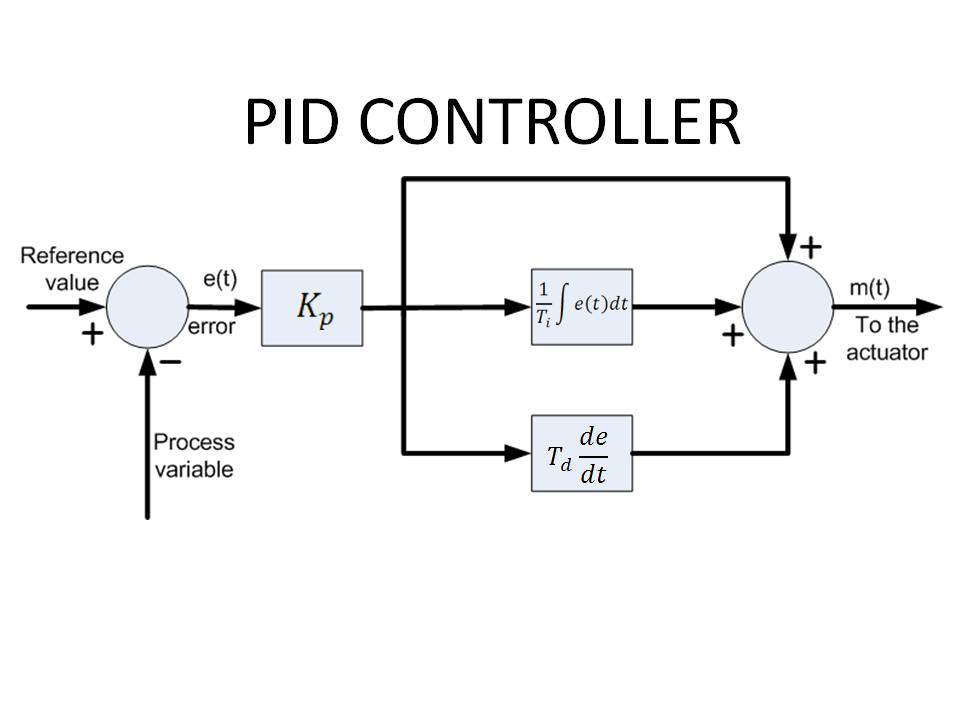
22:50 PID Controller and its Design
36:34 Continuous Simulation (simple)
42:29 Discrete Simulation (not that simple). Windup phenomenon.